Sadly, my summer is coming to its end so I’ve been taking my trikes out for as many drives as possible to get the last few miles out before I return to Nottingham. I’ve decided to take a video of me driving around my estate – for your pleasure, of course!
 Yeh, I look like a massive idiot with a camera attached to my head by elastic bands!
Yeh, I look like a massive idiot with a camera attached to my head by elastic bands!
This was a great proof of concept for using “swegway” “hoverboard” *insert other lame names* wheels to power an EV. While the whole swegway thing is cool, I much prefer not having to expend effort in trying to balance (my poor excuse because realistically, I want one).
In light of a more lighter (ha.) version, I’ve started to design a micro EV that I will be able to carry on my back. It will be made from aluminium as opposed to steel and will use 6.5″ wheels as opposed to 10″ wheels. I’d also probably use two of the omniwheels off my skates for the front two casters as omniwheels mean steering would be much easier as loads of torque isn’t required to pre-align the caster wheel.
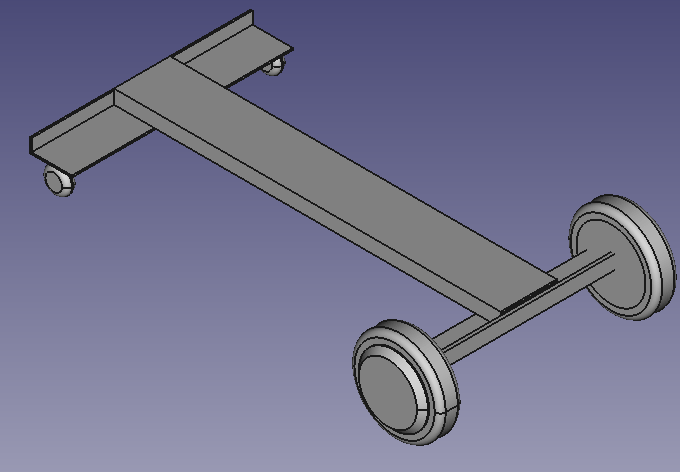 A quick FreeCAD render
A quick FreeCAD render
With a little bit of maths, I’ve calculated the total weight of this to be just under 10kg (2.9kg/rear wheel, 2.3kg for the aluminium and the rest for screws/fixings, the omnicasters, a battery and controller). Hopefully my PCBs will arrive soon too meaning I can have a go at making a dual controller myself.
This is a very simple design and will hopefully be small enough to keep the weight down. Total length/width would be 700x500mm, pretty small! I’d also use a bike seat on the main central bar to save my bum from the uncomfortable journey. Sadly, because of the use of omnicasters however, this couldn’t be used offroad. If I was to use small 3″ rubber casters instead however, I could probably manage grass though I doubt it could do the muddy areas of steel mcgee supertrike.
Keep tuned for PCB updates!

I think a micro EV that you can carry on your back sounds like an amazing idea.