Its been a ton of time since I last did any updates on the ol’ human sized hexapod! I finally decided to go for dedicated motor controller ICs (Allegro A4950) as opposed to a discrete solution. These chips were pretty expensive (~£27 for the entire board…) driven by an STM32F030 once again generating software PWM. This PCB turned out pretty simple and seems fine driving the actuators. The ICs implement chopped current limiting, currently set to 3A along with overcurrent, overtemperature and other things that might break the chips. During operation, they don’t even get very warm so obviously losses are minimal. I’m currently running them at 2kHz PWM frequency so while its a bit annoying with it being in the audible band, switching losses are minimised. Once again, PD controllers are used for the positional control and were tuned iteratively.
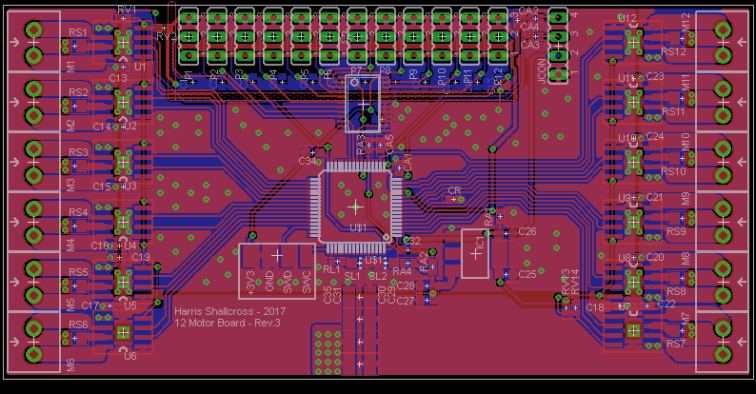
New PCB revision
Once again, all of the pots are mux’d into a single analog input using a 74HC4067. A UART header is also present for control through serial. I’ve currently got a HM10 connected through UART and can control my hexapod using a bluetooth terminal on my phone.
I’m yet to make a dedicated app for bluetooth control but I’ll get round to this eventually… I have however tested this out for real and it takes proper steps.
And for an actual step!
The above was filmed on a chair so its not particularly high quality… I unfortunately can’t sit on it as of yet as my threaded holes are poor so I need to fix those. I’ll eventually get a video of me driving it though!
